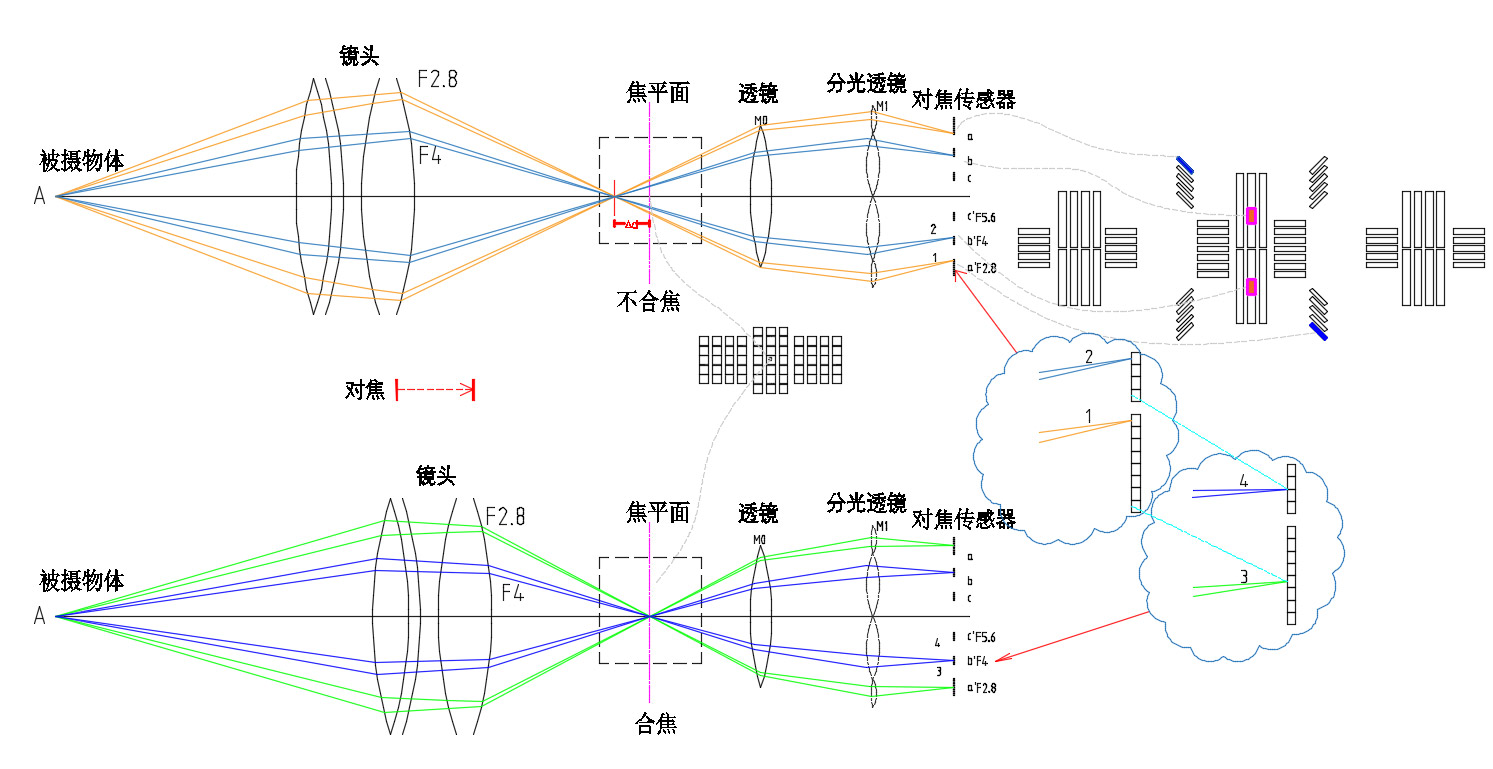
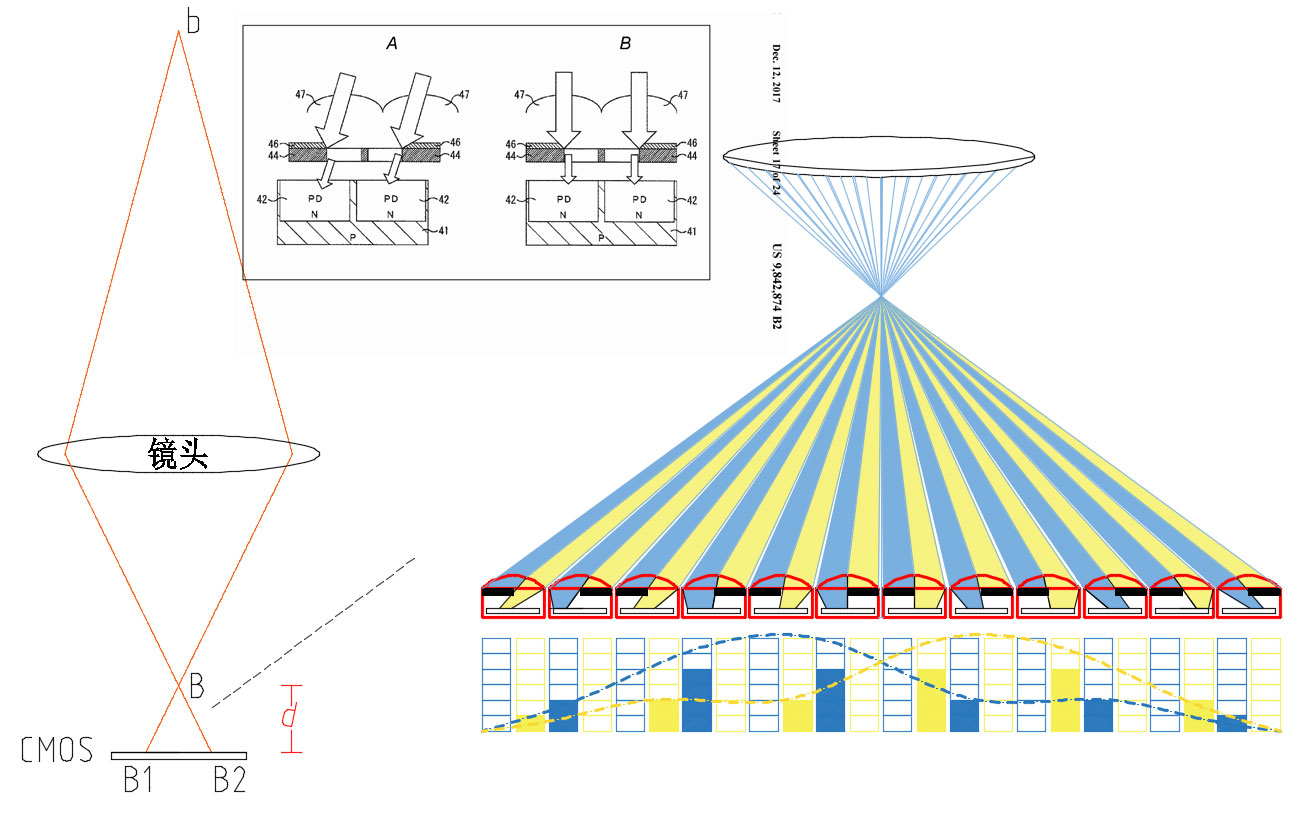
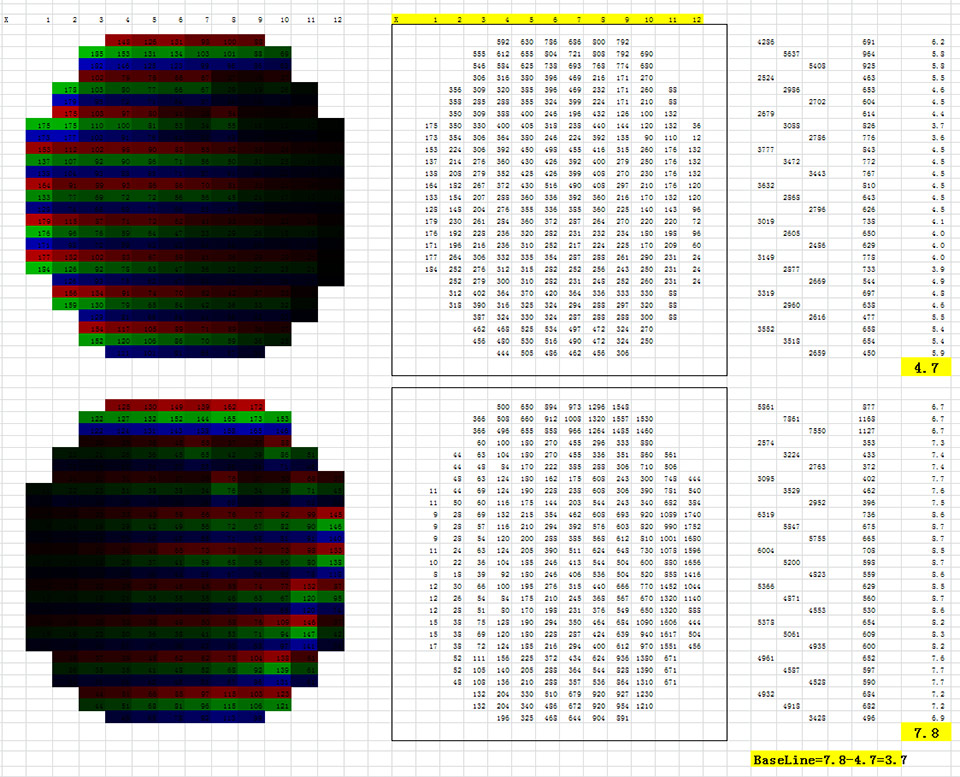
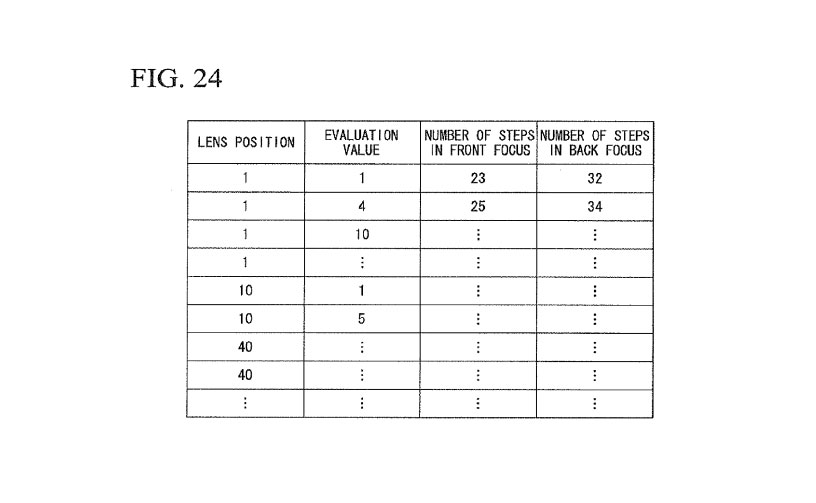
主题:技术男烦恼于一些问题不明白~~:片上对焦,对焦与跟焦 [主题管理员:iZaZaD]
正序浏览
主题图片汇总
主题内检索




相关标签:
佳能
尼康
松下
索尼
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
386 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
385 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
384 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
383 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
382 帖



(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
381 帖



(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
380 帖



(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
379 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
378 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
377 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
376 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
375 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
374 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
373 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
372 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
371 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
370 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
368 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
367 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
366 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
365 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
364 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
362 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
361 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
360 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
359 帖
回复主题: 技术男烦恼于一些问题不明白~~:片上对焦,对焦与跟焦
功能受限
游客无回复权限,请登录后再试